

Motor Control
OverviewHigh-Performance, Multi-axis Motor Control for Space and Aviation ApplicationsMicrochip’s Flash-based, radiation-tolerant FPGAs serve as an ideal platform for the integrated motor control requirements of Space and aviation applications. They offer high-performance solutions for high-speed, low latency algorithm processing, strong design security, differential power analysis (DPA) resistance and integration of complementary functions while offering steadfast performance in harsh conditions of temperatures, pressure, and altitude. Microchip’s motor control solution includes modular algorithmic blocks for field-oriented control (FOC) transformations, PI controller, space vector modulation, core 3 phase PWM, rate limiter, position and speed estimator, encoder interface, and stepper angle generator blocks. Reference designs are available that demonstrate multi-axis motor control solutions on the Smartfusion2 SoC FPGA and the RTG4 FPGA and LX7720 Rad Tolerant Spacecraft Motor Controller. Industrial Motor Control Solutions
Motor Control for QuadcoptersThe Microsemi multi-axis motor Control Solution can be used to build high-performance drones used in Industrial, Military, Aerial vision etc. The solution offers maximum efficiency and increased drone flight time by employing Field Oriented Control (FOC) of BLDC motors on FPGA to generates sinusoidal currents. With a single FPGA for Multi-axis control and central flight control, the solution allows for stable gyros and improved mechanical reliability due to improved noise and vibration parameters. 
Deterministic ProductsConsider Microsemi for your one-stop deterministic motor control solution needs, from SiC diodes, MOSFETs, and power modules to FPGAs with a hardened ARM® Cortex-M3 microcontroller and 5K to 150K logic elements, Power-over-Ethernet (PoE) devices and Midspan products, timing solutions, security, storage, and more. Our robust portfolio for industrial motor control designs includes:
ApplicationsServing Key Industrial Motor Control ApplicationsMicrosemi offers a complete hardware and software solutions portfolio to meet your industrial motor control needs and serve a variety of applications including:
Find your local Microsemi sales office today to find the right Microsemi SolutionsBuild Safe, Reliable Deterministic Applications with Microsemi SoCs and FPGAsReference Design Features
SmartFusion2 Dual-axis Motor Control Starter KitMicrosemi offers an easy-to-use hardware platform on which IPs can be easily implemented. 
Board Specifications
The solution has control designs which are implemented for motoring control algorithms mentioned in the table below. The position control algorithm of stepper motor supports up to 2048 micro-steps.
|









| Part Number | Description | Status | List Price |
|---|---|---|---|
| SF2-MC-STARTER-KIT | SmartFusion2 Dual-Axis Deterministic Motor Control Starter Kit | Available | $899 |
Sales Services
- Contact your local Microsemi Sales representative for more information.
- Search for available stock
- Request a quote
- Request factory programming services
Buy Now
- Buy online from Arrow
- Buy online from Digikey
- Buy online from Future Electronics
- Buy online from Mouser Electronics
- Buy from Microsemi SoC Direct
Resources
Brochures & Articles
| SoC deterministic motor control Dual Axis Brochure |  |
585 kB | 4/2017 |
Computer Based Training
| Three Modules Available for training - Please click here | 8/2014 |
IP User Guides
| UG0678: Sequence Controller User Guide | 196.01 kB | 6/2016 |
| UG0690: Hall Interface User Guide | 232.9 KB | 2/2016 |
| UG0659: Encoder Interface User Guide | 234.72 KB | 5/2016 |
| UG0658: Open-loop Manager User Guide | 232 KB | 4/2016 |
| UG0657: ADC Scaling v4.2 User Guide | 273.16 KB | 8/2017 |
| UG0656: PWM Scaling User Guide | 216.8 KB | 1/2017 |
| UG0612: Speed ID IQ PI Controller IP User Guide | 245.79 KB | 10/2015 |
| UG0609: Stepper Theta Generation IP User Guide | 191.24 KB | 10/2015 |
| UG0595: Rate Limiter IP User Guide | 164.2 KB | 10/2015 |
| UG0608: BLDC Estimator v4.2 User Guide | 80.77 KB | 9/2017 |
| UG0607: FOC Transformations User Guide |
251.9 KB | 10/2015 |
| UG0362: Three-phase PWM User Guide | 178.22 KB | 10/2015 |
| UG0468: Space Vector Modulation IP User Guide | 232.27 KB | 8/2015 |
| UG0733: Sinc3 Filter v4.1 User Guide | 92.72 KB | 12/2018 |
| UG0735: Resolver Interface v4.2 User Guide | 137.15 KB | 12/2018 |
| UG0812: T-Format Interface User Guide |
213 KB | 3/2018 |
| UG0845: Median Filter v4.1 User Guide | 154 KB | 12/2018 |
Firmware User Guide
| UG0692: Motor Control Firmware User Guide | |
234.9 KB | 3/2016 |
Demo Design and Guides
DG0598: SmartFusion2 Dual-Axis Motor Control Starter Kit Demo Guide
|
|
4.49 MB | 12/2017 |
Reference Designs
| Encrypted IP Cores and Reference Designs | BLDC Sensorless and Stepper Motor BLDC with Encoder BLDC with HALL BLDC with Resolver |
Board/Schematics
| SF2-MC-STARTER-KIT Schematics | 2.1 MB | 10/2015 |
Application Notes
| AC445: Motor Control Design using SmartFusion2/IGLOO2 Devices Application Note | |
1.47 MB | 12/2017 |
White Papers
This email address is being protected from spambots. You need JavaScript enabled to view it. |
IP Suite
IP Solutions for Multi-Axis Deterministic Motor Control Applications
Microsemi offers modular and comprehensive IP portfolio and solution for Multi-axis deterministic motor control applications. The rich library of IP provides for quick and easy implementation, optimized to leverage FPGA advantages. The IPs are available as Encrypted design projects (Libero SoC), VHDL and Verilog code for FPGA.
| IP Core Name | Description |
|---|---|
| ADC Scaling | Scales the ADC raw values for FOC |
| BLDC Estimator | Estimates position and speed of BLDC motor |
| Encoder_interface | Generates angle and speed from encoder signals |
| FOC TRANSFORMS | Clarke, Park, Inverse Clarke and Inverse Park transforms |
| OLMNG | Generates angle for open loop operation |
| PWM_SCALING | Converts voltage FOC outputs to PWM period level |
| PWM3PH | Generates 3phase PWM outputs for inverter |
| RATE_LIMITER | Limits the rate of change of speed reference |
| SEQ_CONTROLLER | Controls the motor start stop, open loop and closed loop transitions |
| SPEED_ID_IQ_PI | PI controller for speed, Id, Iq |
| STEPPER_THETA | Generates angle for stepper motor micro stepping |
| SVM | Space vector modulation |
| Hall_Interface | Angle and Speed computation with higher resolution |
| PI_Controller | Standalone PI controller |
| Resolver IP | Resolver Interface IP with RDC |
| T-Format Interface | Interface to Read/Write data from Tamagawa Absolute Encoder |
The Motor Control IP suite and Libero reference designs projects are fully tested and optimized to work with SmartFusion2 based Dual axis deterministic Motor Control Starter Kit.
IP cores and reference designs are available as Encrypted design projects (Libero SoC) and VHDL/Verilog source code. One-time registration is required to download the Reference designs and cores.
| Part Number | Description | Status/List Price | |
|---|---|---|---|
| Hardware Boards | SF2-MC-STARTER-KIT | SmartFusion2 Motor control Starter kit | $899 |
| IP | Encrypted Motor control IP Cores in Libero SoC | Available / Free | |
| Encrypted Motor control Reference designs | Available / Free - Download | ||
| MCSOLCores-RM | Motor control IP Cores with RTL Source code - Node locked license | Available. Contact - This email address is being protected from spambots. You need JavaScript enabled to view it. or Microchip Sales representative for more information |
Motor Control Designs:
(Click topic to read more)+ BLDC Sensorless
Sensor-less Field oriented control (FOC) of BLDC/PMSM
There are different methods of controlling a BLDC motor. Among them, Field Oriented Control (FOC) gives the best performance in terms of torque ripple and efficiency. Implementation of FOC needs precise rotor position information. Sensors can be mounted on the rotor or within the motor to sense rotor position. But using a position sensor is not feasible for applications that demand high reliability or high speed or where size and cost are constraints. The reference design provides a sensor-less algorithm where a back-emf based estimator is used to estimate rotor position based on a mathematical model of the motor.
The reference design is a combination of BLDC motor sensor-less control and stepper motor control.
Size of the design:
|
Combo logic elements |
7417 |
|
Sequential logic elements |
5054 |
|
Multipliers (MACC) used |
12 |
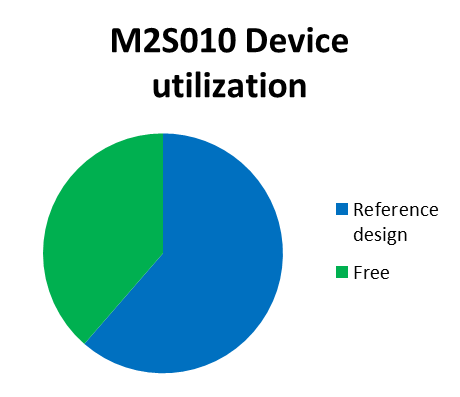
Device utilization: 61.38%
+ Stepper Motor
Stepper motor micro-stepping
Stepper motors are used for position control and are designed to operate in open loop (without position feedback). Their inherent stepping ability allows for accurate positioning without feedback. A stepper moor can be controlled through a series of alternate pulses on stepper motor coils. But such a method will result in poor efficiency and torque ripple that generates noise. Micro-stepping along with current control is the efficient way to control stepper motor and minimize noise/vibration caused by torque ripple. Increasing the number of micro-steps improves the performance. The reference design can generate up to 2048 micro-steps and uses the principle of vector control.
Click here to download Encrypted Reference Design
The reference design is a combination of BLDC motor sensor-less control and stepper motor control.
Size of the design:
|
Combo logic elements |
7417 |
|
Sequential logic elements |
5054 |
|
Multipliers (MACC) used |
12 |
Device utilization: 61.38%
+ BLDC with Encoder
BLDC with Encoder
Rotor position sensors are mandatory in applications that demand full torque at the time of starting and at low speeds. Quadrature encoder is the widely used sensor to sense rotor position with high resolution and low cost. The encoder interface algorithm in the IP converts the signals from encoder into angle and speed that can be used for FOC. The angle is incremented at each transition of the encoder signals through an interrupt. An encoder with high resolution generates interrupts at a faster rate. Implementation of encoder interface in FPGA allows parallel computation of FOC and encoder interface and doesn't affect the FOC loop execution.
Click here to download Encrypted Reference Design
Size of the design:
|
Combo logic elements |
3792 |
|
Sequential logic elements |
2526 |
|
Multipliers (MACC) used |
7 |
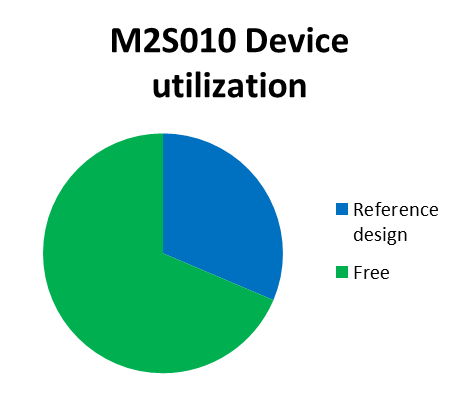
Device utilization: 31.38%
+ BLDC with HALL
BLDC with Hall Sensors
BLDC motors are fitted with HALL sensors that provide rotor information for commutation of phases. The HALL sensors are generally used for block commutation and are not directly suitable for FOC because of their poor resolution (600 electrical). The HALL interface IP generates high resolution angle from low resolution HALL sensors. The angle and speed computed from HALL interface are used by FOC for efficient control of BLDC motor without torque ripple. As HALL sensors provide absolute position information, the motor can be operated at full torque at the time of starting and at low speeds.

Click here to download Encrypted Reference Design
Size of the design:
|
Combo logic elements |
3892 |
|
Sequential logic elements |
2576 |
|
Multipliers (MACC) used |
7 |
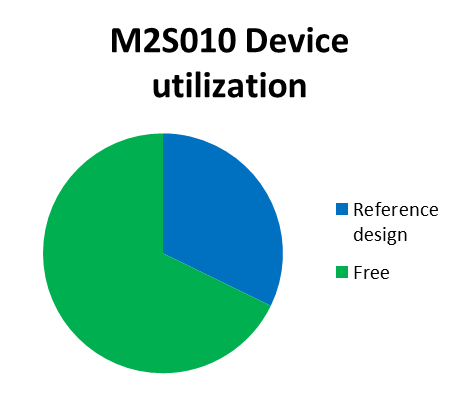
Device utilization : 32.21%
This email address is being protected from spambots. You need JavaScript enabled to view it. |
+ Induction Motor
Induction motor
AC Induction motors are used in many industrial and consumer applications. The three-phase induction motors are increasingly used in industrial aplications like variable-frequency drives.
Microsemi's induction motor design supports both varaiable-frequency and current control mode. The reference design is very compact with implementation possible using only a 5K LE FPGA. The control loop time computation takes only 1 µs and it also offers features such as over current detection, PWM pulse blocking with in one clock cycle (10 ns) for IGBT fault protection and a wide frequency range (1KHz to 500KHz).

Click here to download Encrypted Reference Design
This email address is being protected from spambots. You need JavaScript enabled to view it. |
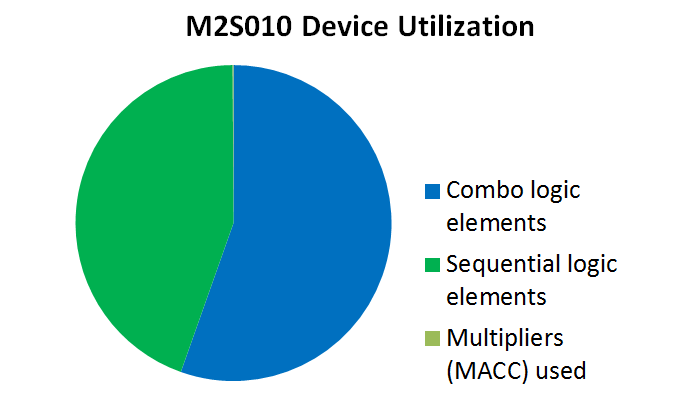
+ BLDC with Resolver
BLDC with Resolver
For motor control applications where reliability is a crucial factor and need to use a sensor to generate high torque at low speeds and stand still, the conventional optical (encoder) and magnetic (HALL) sensors are not suitable. These sensors are susceptible to temperature, external magnetic field, dirt and other environmental conditions. Resolver sensor is immune to such conditions and operate in harsh environments. A resolver is an inductive sensor that contains a rotor and one primary and two secondary windings that are stationary. The primary winding is excited with a high frequency voltage. A voltage is induced in the secondary windings that is a sine and cosine function of rotor angular position. The device that excites the primary winding and demodulates the measured secondary voltages into angular position is called Resolver to Digital Converter (RDC). The reference design integrates the functionality of an RDC along with Field oriented Control (FOC) to provide an complete resolver based motor control solution. Note: The SmartFusion2 Dual-axis Motor Control Starter Kit doesn’t support direct interface of resolver. It needs an external hardware to interface resolver using J25 connector on the starter kit

Click here to download Encrypted Reference Design
Size of the design:
|
Combo logic elements |
4504 |
|
Sequential logic elements |
3617 |
|
Multipliers (MACC) used |
7 |
This email address is being protected from spambots. You need JavaScript enabled to view it. |
Featured Parts
Product Directory
- Product & Services Directory
 FPGA & SoC
FPGA & SoC - Boards and Kits SmartFusion2 Kits
- FPGAs IGLOO2 FPGAs
- Product & Services Directory Ethernet and PoE Solutions
- Ethernet and PoE Solutions Ethernet PHYs
- Audio & Voice Audio Processing
- Product & Services Directory Timing & Synchronization
- Drivers, Interfaces, and PCIe Switches Inductive Position Sensors
- Product & Services Directory Power Discretes & Modules
- Silicon Carbide (SiC) Semiconductor SiC MOSFET
- SiC Modules SiC Diode Modules
- SiC Modules SiC MOSFET Modules
- Power Discretes & Modules Voltage & Current Regulation Diodes
- Power Discretes & Modules Power MOSFET
- Power Modules IGBT Modules